


在應(yīng)用處理器上開發(fā)實(shí)時(shí)任務(wù)系統(tǒng)
應(yīng)用處理器的應(yīng)用范圍越來(lái)越廣泛。系統(tǒng)芯片都是采用ARM®Cortex-A 正在搶占部分原來(lái)由 ARM® Cortex-M和其他微處理器設(shè)備統(tǒng)治的市場(chǎng)。這種趨勢(shì)由幾個(gè)因素造成:
通常和 IoT 相關(guān)的強(qiáng)烈互聯(lián)需求,不僅從硬件上,也有軟件、協(xié)議以及安全相關(guān)方面
深度互動(dòng)界面的要求,例如多點(diǎn)觸控、高分辨率顯示以及豐富的圖形界面
隨著SoC的量產(chǎn)以及新產(chǎn)品功能提高,SoC 的價(jià)格在下降
作為支持上面論述的典型案例是我們消費(fèi)者每天都看到產(chǎn)品的重新設(shè)計(jì),從微控制器升級(jí)到微處理器。這種遷移伴隨著新的挑戰(zhàn),例如設(shè)計(jì)變得越來(lái)越復(fù)雜,操作系統(tǒng)的抽象層也更加繁雜。使用應(yīng)用處理器所帶來(lái)的復(fù)雜硬件設(shè)計(jì)的難題可以被公版參考設(shè)計(jì)以及使用現(xiàn)成的計(jì)算機(jī)模塊/系統(tǒng)模塊或者單板電腦所克服。在操作系統(tǒng)層面,嵌入式Linux系統(tǒng)已經(jīng)在行業(yè)中得到廣泛應(yīng)用。大量的開源工具簡(jiǎn)化功能豐富的復(fù)雜嵌入式系統(tǒng)開發(fā)。如果使用微控制器,類似的開發(fā)工作將變得復(fù)雜和耗時(shí)。盡管有著諸多的好處,使用類似Linux 操作系統(tǒng)仍舊產(chǎn)生了不少的質(zhì)疑和缺乏信心,熱別是針對(duì)實(shí)時(shí)控制應(yīng)用。
開發(fā)人員通常的做法是將實(shí)時(shí)任務(wù)和一般任務(wù)分?jǐn)偟讲煌奶幚砥魃稀R虼耍愃婆c Cortex-A的處理器主要用于多媒體和聯(lián)網(wǎng)功能,而微控制器則仍然被用作處理實(shí)時(shí)、關(guān)鍵性任務(wù)。本文旨在為開發(fā)人員提供一些建議,當(dāng)他們需要使用應(yīng)用處理器完成實(shí)時(shí)系統(tǒng)的時(shí)候。
測(cè)試實(shí)時(shí)性能
現(xiàn)在有許多 benchmark工具可以用于評(píng)估軟件系統(tǒng)的實(shí)時(shí)性能,然而我們想要快速地測(cè)試下面提到的方法是否可以真的提高系統(tǒng)性能。為了看到結(jié)果,我們測(cè)量由嵌入系統(tǒng)的標(biāo)準(zhǔn)GPIO 產(chǎn)生的方波抖動(dòng)。用這種方法,我們可以簡(jiǎn)單、快速地分析實(shí)時(shí)性能,并提供初步的優(yōu)化建議。我們開發(fā)了一個(gè)以2.5KHz(200μsHigh / 200μs Low) 頻率翻轉(zhuǎn) GPIO的應(yīng)用。用示波器連接 GPIO,測(cè)試方波和輸出時(shí)序。

圖1:抖動(dòng)測(cè)試
標(biāo)準(zhǔn) Linux 測(cè)試結(jié)果如圖2所示。翻轉(zhuǎn) GPIO的應(yīng)用配置為實(shí)時(shí)任務(wù)(SCHED_RR),內(nèi)核配置了Voluntary Kernel Preemption(CONFIG_PREEMPT_VOLUNTARY)。

圖2:使用標(biāo)準(zhǔn) Linuxe內(nèi)核配置的方波抖動(dòng)分布圖
測(cè)試結(jié)果表面只有 92% 的波形在 ±10%的誤差以內(nèi)。最差的測(cè)量結(jié)果顯示延時(shí)超過(guò) 15ms,逾 3700% 的誤差。
Real-Time Linux
本文中我們采用第一個(gè)方式是軟件相關(guān)的。Linux 并不是一個(gè)實(shí)時(shí)操作系統(tǒng),但是許多項(xiàng)目在很大程度上提高了 Linux 的決策能力和實(shí)時(shí)性。其中一個(gè)項(xiàng)目是Real-Time Linux project。Real-Time Linux是一系列的補(bǔ)丁(PREEMPT_RT),為 Linux 內(nèi)核提供新的強(qiáng)占機(jī)制,以及其他的功能和工具,使其更加適合于實(shí)時(shí)任務(wù)。你可以在其官方 Real-Time Linux Wiki (之前在這里)上找到應(yīng)用 PREEMPT_RT 補(bǔ)丁和應(yīng)用開發(fā)的文檔。
我們?cè)?ColibriiMX6DL 上使用PREEMPT_RT 來(lái)驗(yàn)證實(shí)時(shí)性能的改進(jìn)。在 Toradex Linux 鏡像中部署PREEMPT_RT 補(bǔ)丁的說(shuō)明可以在 ToradexDeveloper Center 上找到。
下面的圖表(圖3)展示了使用 PREEMPT_RT 補(bǔ)丁的 Linux 的實(shí)時(shí)強(qiáng)占測(cè)試結(jié)果。結(jié)果表明只有0,002%的波形超過(guò)±10% 的誤差。最差的結(jié)果(0,106us)也只有 25% 的誤差,相比于標(biāo)準(zhǔn) Linux(圖2)這是一個(gè)很大的提高。

圖3:使用 Preempt-RT內(nèi)核配置方波抖動(dòng)分布圖
使用 PREEMPT_RT 補(bǔ)丁的軟件方案 CodesysSolutions。其依靠 Real-Time Linux 內(nèi)核以及 OSADL,部署軟件 PLC方案,這已經(jīng)在自動(dòng)化產(chǎn)業(yè)中得到廣泛的使用。你可以在這里找到更多關(guān)于在Toradex 計(jì)算機(jī)模塊上運(yùn)行 Codesys 的信息,包括演示 demo。
Xenomai
Xenomai 是另外一個(gè)實(shí)現(xiàn) Linux 實(shí)時(shí)系統(tǒng)的框架。Xenomai 通過(guò)提在 Linux 內(nèi)核提供一個(gè)co-kernel 而實(shí)現(xiàn)。co-kernel 處理實(shí)時(shí)任務(wù),并擁有比標(biāo)準(zhǔn) Linux 更高的優(yōu)先級(jí)。在這里你可以了解更多信息。為了使用 Xenomai 的實(shí)時(shí)特性,你必須使用實(shí)時(shí) APIs(libcobalt)來(lái)連接用戶應(yīng)用和 Cobalt 內(nèi)核,后者確保任務(wù)的實(shí)時(shí)性能。

圖4:Dual Core Xenomai配置
關(guān)于安裝Xenomai 到你的設(shè)備的相關(guān)文檔可以在 Xenomai 網(wǎng)站找到:www.xenomai.org。除此之外,還有許多嵌入式硬件可以使用,詳見: 參考硬件列表(包括NXP® i.MX SoC 系列)
我們?cè)俅问褂梅讲y(cè)試 Xenomai 在 i.MX6 SoC 的性能。使用 Toradex 的 Colibri iMX6DL作為測(cè)試設(shè)備。我們采用和上面提到的 Real-Time Linux 同樣的方式來(lái)測(cè)試。測(cè)試所用的部分代碼如下所示,使用 XenomaiAPI。
void blink(void *arg __attribute__((__unused__)))
{
int iomask = 0;
rt_task_set_periodic(NULL, TM_NOW, TIMESLEEP);
while(1)
{
rt_task_wait_period(NULL);
if(iomask) SET_G35;
else CLR_G35;
iomask = 1 - iomask;
}
}
int main(void)
{
rt_task_create(&blink_task, "blinkLed", 0, 99, 0);
rt_task_start(&blink_task, &blink, NULL);
getchar();
rt_task_delete(&blink_task);
return 0;
}下圖(圖5)是 Xenomai 的測(cè)試性能。同樣,實(shí)時(shí)解決方案相比于標(biāo)準(zhǔn) Linux有著巨大的優(yōu)勢(shì)。值得注意的是,最差的結(jié)果也在 ±10% 的誤差以內(nèi)。

圖5:使用 Xenomai的方波抖動(dòng)分布圖
異構(gòu)多核處理
異構(gòu)多核處理(HMP)是硬件解決方案。諸如 NXP i.MX7 系列、 NXP i.MX6SoloX 和即將面市的 NXPi.MX8 系列 提供了不同功能的內(nèi)核。例如我們看 i.MX7S,你會(huì)發(fā)現(xiàn)一個(gè)具有Cortex-A7@800MHz 和 Cortex-M4@200MHz 的雙核處理器。基本的目的是用戶界面和高速互聯(lián)由類似 Linux的操作系統(tǒng)在 Cortex-A 運(yùn)行,與此同時(shí),控制任務(wù)由類似 FreeRTOS 的實(shí)時(shí)操作系統(tǒng)在 Cortex-M上執(zhí)行。兩個(gè)核都能夠訪問(wèn)內(nèi)存和外設(shè),在定義每個(gè)核上運(yùn)行的任務(wù)時(shí)保持靈活性。參考圖6。

圖6:i.MX7 框圖,來(lái)源技術(shù)手冊(cè)
使用 HMP 的優(yōu)勢(shì):
原來(lái)在微控制器上的軟件可以被方便地重新使用
簡(jiǎn)化固件(M4 核)更新,固件在 Cortex-A OS 的文件系統(tǒng)作文一個(gè)普通文件
提高內(nèi)核選擇外設(shè)的靈活性。因?yàn)檫@是軟件定義的,后續(xù)的更改無(wú)需硬件設(shè)計(jì)修改
更多關(guān)于基于 HMP 處理器應(yīng)用開發(fā)的信息請(qǐng)參考下面的內(nèi)容:
文章: A Balancing Robot Leveraging the Heterogeneous AsymmetricArchitecture of i.MX 7 with FreeRTOS and Qt
文章:FreeRTOSon the Cortex-M4 of a Colibri iMX7
網(wǎng)絡(luò)研討會(huì)議:Introducingthe i.MX7 System on Chip
Toradex、Antimicro 和 The Qt Company 聯(lián)合開發(fā)了一個(gè)機(jī)器人來(lái)展示這個(gè)概念。機(jī)器人的名字是 TAQ,采用Toradex計(jì)算機(jī)模塊 ColibriiMX7 的自平衡機(jī)器人。用戶界面在 Linux 中使用 Qt 構(gòu)建,運(yùn)行在 Cortex-A7 上,平衡和電機(jī)控制則由Cortex-M4 完成。雙核之間的通信實(shí)現(xiàn)了遠(yuǎn)程控制和面部動(dòng)畫,正如視頻中演示的一樣.
圖7 是 Colibri iMX7 的測(cè)試結(jié)果。方波由運(yùn)行在 i.MX7M4 上的 FreeRTOS 生成。和預(yù)計(jì)的一樣,測(cè)試結(jié)果好于上面其他所有的方法。

圖7:使用異構(gòu)多核架構(gòu)的方波抖動(dòng)分布圖 方波由運(yùn)行在 M4 上的 FreeRTOS 生成。
總結(jié)
本文概括介紹了在應(yīng)用處理器上使用 Linux作為操作系統(tǒng)開發(fā)實(shí)時(shí)系統(tǒng)的解決方案。對(duì)于想要使用微處理器并且關(guān)注實(shí)時(shí)控制和決策的開發(fā)者,這可以作為入門。我們展示了使用異構(gòu)多核處理的 SoC 硬件方案,以及兩個(gè)基于軟件的方法:Linux-RT Patch 和Xenomai。演示的結(jié)果并不是為了對(duì)比操作系統(tǒng)或者實(shí)時(shí)技術(shù)。每一種方法都具有優(yōu)勢(shì)和劣勢(shì),最終還是取決于應(yīng)用場(chǎng)景。
文章主要為了說(shuō)明幾種現(xiàn)成的解決方案可以在應(yīng)用處理器上使用 Linux 實(shí)現(xiàn)可靠的實(shí)時(shí)應(yīng)用。




 投訴建議
投訴建議
提交
Verdin AM62 LVGL 移植

基于 NXP iMX8MM 測(cè)試 Secure Boot 功能
隆重推出 Aquila - 新一代 Toradex 計(jì)算機(jī)模塊

Verdin iMX8MP 調(diào)試串口更改
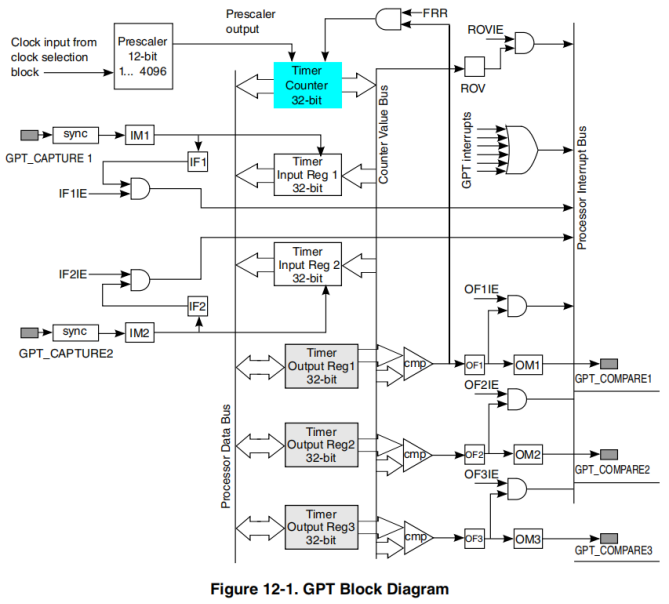
NXP iMX8MM Cortex-M4 核心 GPT Capture 測(cè)試